|
|
|
|
聯系方式(shi)
|
| 電話(市場(chang)部): |
| (拓展部(bu)): |
| 傳真: |
|
節假(jiǎ)日商務聯(lián)系電話:
何(he)經理: 劉經(jīng)理: |
| 郵編:211600 |
| 網(wang)址:/ |
| http://banyunshe.cc/ |
| [email protected] |
|
|
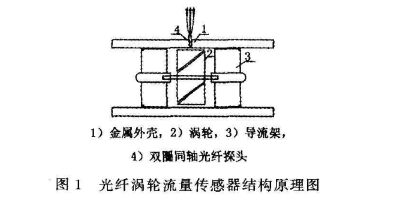
您現(xian)在的位置(zhì) > 首頁 > 行業(ye)新聞 > 雙圈(quan)同軸式光(guāng)纖渦輪流(liú)量計設計(ji) |
|
|
時間:2022-8-30 08:22:01 |
|