摘要:根據(jù)磁阻傳感器的(de)角位移測量原(yuán)理,提出智能金(jin)屬管浮子流量(liang)計
的設計方案(an).該方案采用低(di)功耗MCU和精度高(gao)ADC實現對流量的(de)♋數字🔴化采集和(hé)智能控制,應用(yong)LMBP算法實現精度(dù)高的靜❓态特征(zhēng)曲線拟合;通過(guò)裁減TCP1IP協議,在以(yi)太網上實現了(le)流量計與用戶(hù)的⛹🏻♀️數據通信.實(shí)際運行表明,設(she)計的流量計系(xi)統運行穩定可(ke)靠.
金屬管浮子(zi)流量計具有耐(nai)高溫耐高壓、耐(nai)腐蝕等特點,在(zài)🈲中低流速、流量(liàng)的工業計量中(zhong)得到了廣泛應(ying)用🌈.目前采用電(diàn)遠傳方♊式的流(liu)量計多以霍爾(er)元件或電容式(shi)角位移作爲傳(chuán)感器,不但結構(gòu)複雜、精度較低(di),而且不具備以(yǐ)太網接口功能(néng).本文中作者🍓應(ying)用各向異性磁(cí)阻的傳感原理(li)設計了一種能(néng)與👈以太網通信(xìn)的❌智能金屬管(guǎn)浮子流量計.該(gāi)流😍量計具有精(jing)度高、功耗低、設(she)計🙇♀️簡單等特點(diǎn),可廣泛應用于(yu)工業計量,特别(bie)是适應了工業(ye)以太網的發展(zhǎn)需求.
1總體設計(ji)
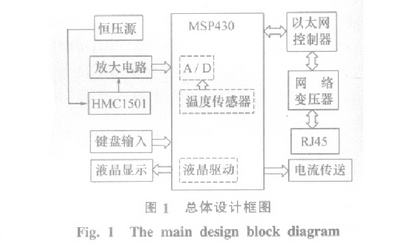
金屬管浮子流(liú)量計由錐形管(guǎn)、内置磁鋼的浮(fú)子以💔及外置嵌(qian)有磁鋼的機械(xiè)連杆等構件組(zǔ)成.當流量變化(huà)💔時,浮子在錐形(xing)管内上下移動(dong),并由磁鋼耦合(he)帶動機械連杆(gǎn)旋轉-定角度.此(ci)角度與流量的(de)大小存在着一(yi)對應的關系,隻(zhī)要測🐆出角度便(bian)🐅可通過對應關(guān)系求出🌈流量,因(yin)此對角度的正(zheng)确測量是流量(liang)計設計的關🏃鍵(jian)♉.具體設計時采(cai)用Honeywell公司生産的(de)磁阻傳感器HMC1501實(shi)♋現對機械連杆(gan)角位移的正确(què)測量,選擇MSP430F449單片(piàn)機作爲MCU,采用CirrusLogic公(gong)👨❤️👨司生産的以太(tài)網🔴控制芯片CS8900A實(shí)現網絡互聯.系(xì)統的總📐體設計(jì)框圖如圖1所示(shì)☎️.
2HMC1501磁阻傳感器的(de)應用
2.1磁阻傳感(gǎn)器的測量原理(li)和工作特性
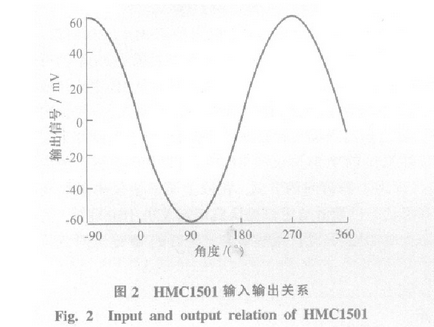
鐵(tie)磁性材料通常(cháng)爲各向異性材(cai)料,當采用特殊(shu)工😍藝将㊙️其制成(cheng)薄膜狀的電阻(zǔ)元件後,便可用(yong)于感測周圍磁(cí)場的變㊙️化.HMC1501傳感(gǎn)器是一種工作(zuò)在磁飽和狀态(tài)下的變換器⛱️件(jiàn),在此狀态下❄️電(diàn)阻對磁場的大(da)小不敏感,僅與(yu)磁場的方向有(yǒu)關,利用此原⭐理(lǐ)就可以感測周(zhōu)圍磁🌈場相對于(yú)傳感器的角度(dù)變化4.圖2顯示了(le)HMC1501的磁場角度和(hé)輸出電壓之間(jian)的對應關系,當(dāng)磁✊場角度爲-45°~+45°時(shi)輸出電壓遞減(jian)且單調性好,因(yīn)此将HMC1501的有效角(jiǎo)度範圍定義爲(wei)±45°,在此範圍内分(fen)辨率小于0.07°.典型(xing)橋路的電阻和(he)輸出電壓分别(bie)爲33kQ和-60~60mV,橋路供電(dian)電🥵壓較寬(1~24V),當以(yǐ)5V供電時功耗僅(jǐn)爲0.76mW,由此可見功(gōng)耗低是該傳感(gǎn)器的優勢之一(yi).該🧡傳感器存在(zài)零點偏置電🌂壓(ya),需☁️進行補償.一(yi)般補償的方法(fa)可分爲硬件補(bu)償和軟件補償(cháng),但硬件補償需(xū)設計複雜的電(dian)路,成本💁較高,而(ér)軟件補💔償随☎️着(zhe)MCU處理能力的提(ti)高得到了😄廣泛(fàn)應用,本設計中(zhong)采用軟件補償(chang).
2.2傳感器檢測電(dian)路設計
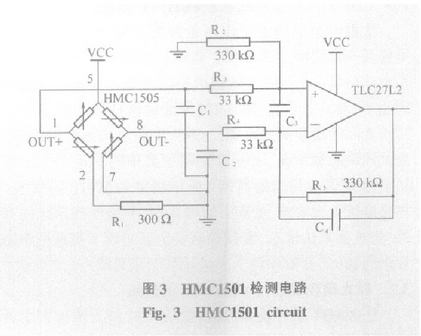
爲簡化(huà)傳感器檢測電(diàn)路設計,采用了(le)依靠單電源供(gòng)電🙇🏻的放大器TLC27L2,這(zhè)就要求OUT+點的電(diàn)位大于OUT-點的電(diàn)位,否則放大☁️器(qi)的輸出就會失(shī)真.但HMC1501的典型輸(shū)出信号♊在.60~60mV之間(jian),因此必🌈須在含(hán)OUT+的支路的節點(diǎn)2和模拟地之間(jiān)串接一阻值大(dà)于243Ω的電阻,爲保(bǎo)證一定🚶的冗餘(yu)度📧,該電阻取300Ω,圖(tu)❗3爲簡化後的傳(chuán)感器檢測電路(lù).
2.3LMBP算法及應用
智(zhi)能金屬管浮子(zi)流量計采用2個(ge)HMC1501傳感器和1個溫(wēn)度傳感器,其中(zhōng)2個HMC1501一個用于感(gan)測連杆磁鋼的(de)方向變化,另一(yī)個用于補償浮(fú)子磁鋼上下移(yi)動所形成的複(fú)合磁場的影響(xiǎng),溫度傳感器感(gan)測HMC1501周圍的溫度(dù)并予以溫度補(bu)償.溫度傳感器(qì)的💯數學模型很(hěn)難用解析式描(miáo)述,傳統的做法(fa)是在不同溫度(du)下進行标定🏃,這(zhe)種做法不🐪但🐇計(ji)算量大、占用存(cun)儲空間多,而且(qiě)計算精度不高(gāo).鑒于人工神經(jing)網絡能夠完成(cheng)任意的非線性(xìng)映射,其中BP算🈲法(fǎ)(BackPropagation)具有以任意精(jing)度逼近任何非(fei)線性函數的能(neng)力,而且無需事(shi)先确定函數💁形(xíng)式,因此利用BP神(shén)經網絡處理傳(chuan)感器靜态特性(xing)的非線性是一(yī)種較好的方法(fǎ)網.但實際應用(yong)時BP算法存在收(shou)斂速度慢和目(mù)标函數存在局(ju)⭕部極小等不足(zu)之處.爲此采🏃♀️用(yòng)基于誤差平方(fāng)和最小化👉的權(quan)值調整算法即(ji)Levenberg-Marquart算法作爲對BP算(suan)法的改進,稱🐆之(zhi)爲LMBP算法.BP算法以(yǐ)均方誤差作爲(wèi)性能函數,其表(biao)達式爲

式中,w爲(wei)網絡的權值向(xiàng)量,t爲期望輸出(chū)向量(标定值🌈),y爲(wei)實際輸🏒出向量(liàng),e爲誤差向量.LM算(suan)法結合了梯度(du)法和高斯-牛頓(dun)法😍的優🔞點,具有(yǒu)全局性和收斂(liǎn)速度快的優勢(shì),并可通🔞過對BP算(suàn)法的修正,避免(mian)高斯-牛頓法中(zhong)求解Hessian矩陣的問(wèn)題,減少了網絡(luo)訓練中的計算(suan)量和内存需求(qiu)量.權值的調整(zheng)公式爲

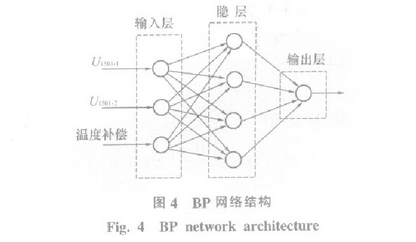
式中,μ爲(wèi)正常數,I爲單位(wèi)矩陣,e。爲網絡的(de)誤差向量,J爲以(yi)網💔絡誤🥰差對權(quan)值的一階導數(shù)爲元素的Jacobian矩陣(zhen).△w每次叠代時🤩都(dou)對🏃μ進行🌍自适應(ying)調整,當網絡誤(wu)差減小時減小(xiǎo)μ的值,反之增加(jiā)μ的值.-般🈲情況下(xia)🙇🏻Jacobian矩陣的計算量(liàng)較大,因此該算(suan)法比較适合💰網(wǎng)絡規模不大、網(wǎng)絡參數較少的(de)應用場合,本🌈設(she)計中使用的是(shi)典型的🧡3層網絡(luò)結構㊙️,如圖4所示(shì).從圖中可以看(kan)出該網❤️絡輸入(rù)層、輸出層、隐層(ceng)的節點分别爲(wèi)3個、1個、4個,網絡規(gui)模較小,因此使(shi)用LM算法可以取(qǔ)得較好的效🈲果(guǒ).
3以太網結構的(de)實現
3.1TCP/IP協議的裁(cai)減
以太網中的(de)TCP/IP協議數以百計(jì),而嵌入式系統(tǒng)的資源有限,沒(méi)有必要實現全(quan)部TCP/IP協議.裁減TCP/IP協(xié)議以适應工業(yè)以太網應用的(de)要求是當前的(de)一個研究熱點(dian),但目前尚無統(tong)一的裁減标準(zhun)4.在本應用中由(you)于網絡的連接(jie)數和數據的傳(chuán)輸量較少,因此(cǐ)以夠用即可”爲(wèi)原則,對TCP/IP協議進(jin)行合理裁減.裁(cai)減後的協議包(bao)括鏈路層中的(de)CSMA/CD.ARP協議,網絡層中(zhong)的IP協議,ICMP中的Ping協(xie)議,傳輸層中的(de)TCP、UDP協議以及應用(yong)層中的HTTP協議.
數(shu)據鏈路層的主(zhǔ)要作用是爲其(qi)上層協議發送(sòng)和接收數據幀(zhēn),采用IEEE802.3規定的CSMA/CD協(xié)議,可使同一局(ju)域網上的多台(tái)計算機共享同(tóng)一物理傳輸介(jie)質,隻要采用通(tōng)用的網絡接口(kou)控制芯片CS8900A就可(ke)實現該協議.以(yi)太網.上數據的(de)傳輸是通過網(wǎng)絡的MAC地址進行(hang)識别的,這就要(yao)求系統具有從(cong)IP地址轉換到MAC地(dì)址的功能,即ARP(地(di)址解析)協議.網(wǎng)絡層中的IP協議(yì)是TCP/IP協議族的核(he)心協議,它使異(yì)構網絡之間的(de)通信成爲可能(néng).ICMP實現與其他主(zhǔ)機或路由器交(jiāo)換錯誤報文和(he)其他重要信息(xi),由于本設計隻(zhī)需測試網絡聯(lian)通情況,因此隻(zhī)保留了其中的(de)Ping協議.傳輸層中(zhōng)的TCP協議和UDP協議(yì)爲2台主機上的(de)應用程序提供(gong)端到端的通信(xìn).應用層中的HTTP協(xié)議實現以浏覽(lǎn)器訪問的方式(shi).在以,上諸多協(xie)議中以實現TCP協(xie)議最爲困難,受(shòu)運算資源限制(zhì),隻能實現簡化(hua)的有限狀态機(ji)和滑動窗口确(què)認機制以及單(dān)TCP連接.另外,爲過(guo)濾來訪信息,确(què)保數據安全還(hái)實現了簡易網(wǎng)絡防火牆功能(néng),隻允許某些事(shì)先設置好的IP地(di)址對流量計進(jìn)行訪問,有效減(jiǎn)輕了流量計的(de)工作負荷.
3.2以太(tài)網控制芯片CS8900A的(de)應用
CS8900A是一款性(xìng)能好、低功耗的(de)以太網控制芯(xīn)片,内部含✂️有802.3介(jiè)質訪問控制塊(kuài)(MAC),支持全雙工操(cao)作,具有自動處(chu)理沖突檢測、報(bào)頭生💋成、CRC校驗碼(ma)生成及其驗證(zhèng)等功能;同時通(tong)過對🌂發送控制(zhi)寄存器(TCMD)的配置(zhì),MAC可以完成幀的(de)自動🤟重傳51.設計(jì)時選擇3V供電的(de)CS8900A-CQ3,同時爲了便于(yu)和MSP430F449之間的電平(píng)匹配,在MSP430F449與CS8900A之間(jian)采用圖5所示的(de)硬件🧡接口0.通過(guo)将管🔴腳/MEMW和/MEMR置高(gāo),使CS8900A工作在簡單(dan)的1/0模式,該模式(shì)占用端口資源(yuan)較少☀️.MSP430F449通過對/SBHE、/IOW和(hé)/IOR等控制信号線(xian)實現對CS8900A工作方(fāng)式的✏️控制和讀(dú)寫操作☔.
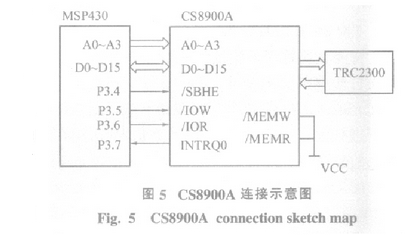
在設計(ji)中考慮到CS8900A芯片(pian)采用的是16位數(shù)據傳輸模式,因(yīn)此在🥵訪問之前(qián)必須爲總線的(de)高位使能管腳(jiao)(1SBHE)提供--個由高到(dào)低,再由低到高(gāo)變化的電平信(xin)号.CS8900A通過網絡隔(gé)離變壓器TRC2023以12.5的(de)電壓比将數據(ju)發送到網絡,以(yǐ)11的電壓比從網(wang)絡接收數據.CS8900A芯(xīn)片的初始化操(cao)作主要包括:軟(ruan)件複位并檢查(chá)标志位、設定16位(wèi)工作模式、設定(dìng)臨時以太網物(wù)理地址、設定接(jie)收幀類型、确🤟定(ding)數據傳送方向(xiang)、中斷使📐能以及(ji)數據收發使能(neng)等.
4結束語
利用(yong)磁阻傳感器HMC1501實(shí)現了流量計機(ji)械連杆在士45°範(fan)圍内🤞角度的🌂正(zheng)确測量,并将流(liu)量計接入以太(tai)網,實現了流量(liang)測量的智能化(hua)和網絡化,實際(jì)運行表明該系(xì)統工作穩定、可(kě)靠.
本文來源于(yu)網絡,如有侵權(quan)聯系即删除!