摘要(yao):設計以(yi)PIC單片機(jī)爲核心(xīn)的
智能(néng)渦輪流(liú)量計
,用(yòng)于蒸汽(qì)流量的(de)測量。結(jié)合氣體(tǐ)流量與(yǔ)密度的(de)特點㊙️設(shè)👈計溫度(du)壓力補(bǔ)償電路(lu),并用串(chuàn)口液晶(jing)顯示模(mó)塊實時(shi)顯示所(suǒ)🐆測的😄流(liú)量大小(xiao)、溫度和(he)壓力,同(tong)時可利(li)用鍵盤(pan)進行參(can)數的🐕設(shè)定和修(xiu)改。該方(fāng)案節省(sheng)了🐪資源(yuan),提高了(le)性價比(bi),保證了(le)系統的(de)精度㊙️和(hé)實時性(xìng)☀️。
在現代(dài)工業生(shēng)産和流(liu)通等領(ling)域,流量(liang)檢測是(shi)計量管(guǎn)理🔞、貿易(yì)結☔算的(de)第一可(ke)靠性依(yi)據,也是(shi)一門實(shí)用💁性很(hěn)強的♊檢(jian)測📐技術(shù)🔞;但流體(tǐ)的複雜(za)性決定(dìng)了流量(liàng)檢測的(de)👈問題也(ye)很多,氣(qi)體流量(liang)的溫度(dù)壓力補(bǔ)償問♈題(tí)就是其(qí)中之一(yī)。流💛量傳(chuan)感器📞在(zai)測量同(tóng)樣介質(zhì)的流體(tǐ)流量參(cān)☂️數時都(dōu)是工況(kuàng)流量,尤(you)其🧑🏾🤝🧑🏼是氣(qì)體,即便(biàn)測量結(jié)果相同(tong),由于受(shou)溫度和(hé)🈲壓力的(de)影響,在(zai)轉換成(cheng)标準流(liú)🍓量時結(jie)果往往(wang)也是不(bu)一緻的(de)。這就産(chan)生💞了流(liú)量檢測(cè)中的溫(wen)度壓力(li)補償問(wèn)題。
在使(shǐ)用流量(liàng)計測流(liú)量時,使(shi)用者如(rú)果不考(kao)慮溫度(dù)🐇壓力🛀補(bǔ)償的♈話(huà),得到的(de)結果往(wǎng)往會與(yu)正确結(jie)果大🔅相(xiàng)徑庭,無(wú)法進♍行(háng)貿✔️易結(jie)算或工(gong)藝考核(hé)。液體體(ti)積⛹🏻♀️幾乎(hu)不受壓(ya)力影響(xiǎng),僅和溫(wen)度有關(guān),而且當(dang)溫度變(bian)化範圍(wéi)很小時(shi),液體體(tǐ)積的變(biàn)化也極(jí)小;但是(shi)氣體受(shou)壓力、溫(wēn)度影響(xiǎng)所引起(qǐ)的流體(tǐ)特性的(de)變化很(hen)大,在流(liu)量檢測(cè)中,氣體(ti)流量溫(wen)度🎯壓力(li)補償的(de)意義重(zhong)大。
1渦輪(lún)流量計(ji)工作原(yuán)理
渦輪(lun)流量計(ji)
作爲最(zuì)通用的(de)流量計(jì)具有精(jing)度高、重(zhòng)複性好(hǎo)等優點(diǎn),廣泛用(yòng)于高壓(yā)、高溫、低(dī)溫及微(wei)流量的(de)測量中(zhong)。渦輪流(liú)量計是(shì)一種速(su)度式流(liu)量計,它(ta)是由渦(wō)輪、軸承(chéng)、前置放(fang)大器、顯(xiǎn)示儀表(biao)組成。被(bei)測流體(ti)沖擊渦(wo)輪葉片(pian),使渦輪(lun)旋轉,渦(wo)輪的轉(zhuǎn)速随流(liú)量的變(biàn)化而變(bian)化⭐,即流(liu)量大,渦(wō)輪的轉(zhuan)速也大(dà),再經磁(cí)電⭕轉換(huan)裝置把(bǎ)渦輪的(de)轉速轉(zhuan)換爲相(xiàng)應頻率(lü)的電脈(mò)沖,經前(qián)🐉置放大(dà)器放大(dà)後,送入(ru)🌈顯示儀(yí)✨表進行(háng)計⭐數和(he)顯示,根(gēn)據單位(wei)時間内(nèi)的脈沖(chòng)數和累(lèi)計脈沖(chong)數🥵即可(kě)求出瞬(shun)時流量(liàng)和累積(ji)流量"。當(dāng)流體沿(yán)着管道(dao)的軸線(xian)💘方向💁流(liu)動、并沖(chòng)擊渦輪(lun)葉片時(shí),流經渦(wo)輪變送(song)器的流(liu)體🚶體積(ji)流量:
2硬(yìng)件電路(lù)設計
2.1總(zong)體設計(ji)
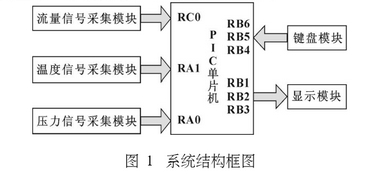
該系統(tǒng)以PIC單片(pian)機爲控(kòng)制核心(xin),包括流(liú)量信号(hào)采集模(mó)♌塊、溫度(dù)🌈和壓力(lì)信号采(cǎi)集模塊(kuai)、鍵盤以(yǐ)及顯示(shi)模塊5個(ge)⛷️部分。流(liú)量信号(hào)采集模(mó)塊使用(yong)渦輪流(liu)量計采(cǎi)集流量(liang)信号,經(jīng)過外圍(wéi)電路處(chu)理後送(song)入單片(pian)機,測量(liang)其頻率(lü),用于流(liu)量計算(suàn);溫度和(he)壓力采(cǎi)集模塊(kuài)将采.集(ji)到的溫(wen)度和壓(ya)力通🧡過(guo)A/D轉換後(hou)送入單(dan)片機,用(yòng).于氣體(ti)的密度(du)🧡計算,對(dui)氣體流(liú)量進行(háng)補償;鍵(jian)盤模塊(kuai)實現對(dui)儀表參(can)🈚數的設(she)置、各顯(xian)示内容(róng)之間的(de)轉換操(cāo)作;顯示(shi)模塊實(shi)⛷️現瞬時(shi)流量、累(lei)積流✨量(liàng)、溫度和(hé)壓力的(de)顯示。系(xi)統的總(zong)體結構(gou)圖如圖(tu)1所示。
2.2PIC單(dan)片機
pIc單(dan)片機采(cai)用哈佛(fó)總線結(jié)構,精簡(jian)指令,運(yun)行速度(du)快,價格(ge)低廉,低(di)功耗,内(nèi)部具有(yǒu)8通道10位(wei)A/D轉換器(qì),最大有(yǒu)8kX14字節的(de)HASH程✍️序存(cún)儲器,工(gong)作👌電壓(yā)範圍寬(kuān),帶振蕩(dang)式看門(men)狗,不🐕需(xū)要任何(hé)外部📐器(qì)件。在該(gāi)系統設(shè)計中具(ju)有🐆較大(dà)的優勢(shi)。
2.3流量檢(jiǎn)測電路(lu)
渦輪脈(mò)沖信号(hao)經濾波(bo)整形放(fang)大後,再(zai)經過光(guāng)電隔離(li)電路後(hòu)㊙️進入PC16F877單(dan)片機進(jin)行脈沖(chong)頻率測(ce)量,從而(ér)測量出(chu)流量的(de)大小。
2.4溫(wēn)度壓力(li)檢測電(dian)路
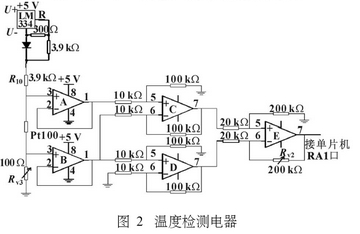
采壓(yā)力傳感(gan)器154n對氣(qi)體壓力(lì)進行檢(jiǎn)測。該傳(chuan)感器屬(shu)♈于壓阻(zǔ)🔞式半導(dao)體壓力(li)傳感器(qì),用電阻(zu)構成電(diàn)橋後🔴接(jiē)電壓跟(gēn)随器送(song)至RA0口。.将(jiāng)Pt100檢測到(dào)的溫度(du)信号經(jing)A、B兩個電(diàn)壓跟.随(sui)器後分(fen)别送至(zhì)減法電(dian)路🤞和放(fang)大電路(lu),再經減(jiǎn)法器E後(hou)進入單(dān)片機的(de)RA1口。
此時(shi)有U7E=100UiA-200IB,電位(wei)器Rv3用來(lái)調零,當(dāng)其阻值(zhí)調至和(hé)Pt100阻值相(xiang)同時,此(cǐ)時U7E爲零(ling),未調整(zhěng)時即爲(wèi)常溫值(zhí)。其原理(lǐ)如圖2所(suo)示.
爲了(le)提高系(xi)統的測(cè)量精度(dù),壓力檢(jian)測和溫(wen)度檢測(ce)均🤩采用(yòng)IM334恒流源(yuan)向其提(ti)供恒定(ding)的電流(liu),同時添(tian)加一個(gè)電阻和(he)一個二(er)極😄管以(yǐ)獲得零(ling)點漂移(yí)操作。
3.系(xì)統軟件(jiàn)設計
3.1總(zong)體設計(jì)
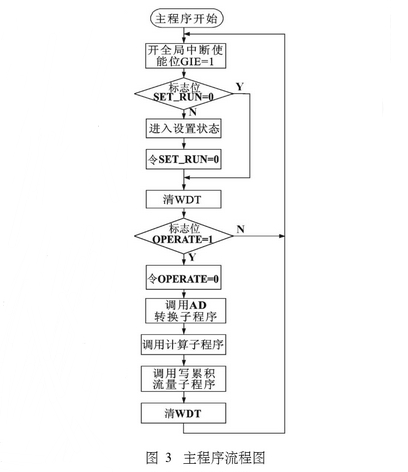
系統軟(ruan)件包括(kuo)初始化(huà)程序、主(zhǔ)程序、中(zhōng)斷控制(zhì)程序、流(liu)量、溫度(du)、壓力檢(jian)測程序(xù)以及鍵(jian)盤顯示(shì)程序等(děng)。初始化(huà)程序主(zhu)要完成(chéng)單片機(ji)初始化(hua)和設置(zhì)計數方(fang)式等。主(zhu)程序主(zhu)要通過(guo)查詢标(biao)志位SET_RUN和(he)OPERATE來判斷(duan)程序是(shi)運行狀(zhuàng)态還是(shi)設置狀(zhuang)态,然後(hòu)調用相(xiang)應的處(chù)理子程(cheng)序。首先(xiān)開全局(jú)中斷,允(yǔn)許單片(piàn)機響應(yīng)所有中(zhong)斷源産(chan)生的中(zhong)斷請求(qiu);當單片(piàn)機查詢(xún)到标志(zhi)位SET_RUN被置(zhì)位時,就(jiù)進入設(shè)置狀态(tai),對儀表(biǎo)系數進(jìn)行設定(ding);進入運(yun)行狀态(tai)後還要(yao)查詢标(biao)志位OPERATE是(shì)否被置(zhi)位,被置(zhi)位後就(jiu)進行溫(wēn)度與壓(ya)力的.A/D轉(zhuan)換、流量(liang)的計算(suan)和數據(ju)的儲存(cún)。中斷程(chéng)序用于(yu)查詢定(dìng)時時間(jiān),進入中(zhong)斷服務(wù)子程序(xu)完成流(liu)量采集(ji)、工作狀(zhuang)況“下溫(wen)度和壓(ya)力采集(jí),瞬時流(liu)量和累(lei)積流量(liang)的計算(suan)。系統主(zhǔ)流程圖(tu)如圖3所(suǒ)示。
3.2流量(liàng)溫度壓(yā)力信号(hao)采集
流(liú)量信号(hào)的采集(jí)主要通(tōng)過計數(shù)器MR0中斷(duàn)服務程(cheng)序完成(chéng),采用定(ding)時器模(mo)式,定時(shí)時間設(shè)爲1so定時(shí)時間到(dào),比較寄(ji)存器裏(lǐ)面的内(nei)容,大于(yu)1s則對計(jì)數器IMR1讀(du)數,以獲(huo)得流量(liàng)信号的(de)頻率,并(bing)清零;小(xiǎo)于1s,則加(jiā)1後結束(shu)。
溫度和(he)壓力信(xin)号的采(cai)集是通(tong)過PICI6F877單片(piàn)機内部(bù)的ADC模塊(kuai)♌将❤️其轉(zhuǎn)換成數(shù)字量,采(cǎi)樣完成(cheng)後計算(suan)出溫度(dù)和壓力(li)值,并将(jiang)這兩個(gè)數值在(zài)液晶屏(píng)上顯示(shi)出來。.
3.3鍵(jiàn)盤顯示(shi)
設置3個(gè)鍵盤,利(li)用電平(píng)變化中(zhōng)斷功能(neng)來實現(xiàn),采用延(yán)時去抖(dou)法,按鍵(jiàn)有效就(jiu)進入按(an)鍵處理(lǐ)程序。F表(biao)示功能(néng)👅鍵,用KI來(lái)表示,每(měi)按一🚶♀️-次(cì)表示在(zài)流量顯(xiǎn)示和溫(wēn)度、壓力(li)顯示間(jian)😘切換,-表(biǎo)⭐示移位(wèi)鍵,用K2表(biao)示,↑爲增(zēng)加鍵,用(yòng)K3表示。如(ru)果F+→(即Kl+K2)被(bei)按下,則(ze)設置标(biāo)志位置(zhì)🌈1,主程序(xù)查詢到(dao)其置1後(hou),就進入(ru)設置🥵狀(zhuàng)态。在該(gāi)狀态下(xia),→(K2)鍵定義(yì)爲移位(wèi)鍵,以❓閃(shǎn)爍表示(shì)光标所(suǒ)在位,每(měi).按一次(cì),閃爍移(yí)到下一(yī)位,到最(zui)後一位(wèi)回閃第(dì)一一位(wèi)。↑(K3)定義爲(wei)增加鍵(jiàn),對光标(biāo)所在位(wei)的數值(zhí)進行修(xiū)改,每按(an)--次,循環(huán)🌈增加一(yī)個🏃🏻♂️定義(yi)單位,定(dìng)義單位(wèi)視參數(shu)類型而(er)定。當程(chéng)序查詢(xun)到↑+→(K2+K3)被按(àn)下時,就(jiu)把累積(ji)流量清(qing)零,并把(ba)标志位(wèi)置1,當查(chá)詢到F(K1)鍵(jian)被按下(xià)‼️時,每按(an)-一次,在(zài)流量顯(xian)📐示和溫(wen)度、壓力(li)顯示之(zhī)間切換(huàn)。
采用段(duàn)式液晶(jing)顯示器(qì)LCM103來顯示(shì)瞬時和(hé)累計流(liú)量,同時(shí)實時✌️顯(xiǎn)😘示溫度(dù)和壓力(li)"。
4溫壓補(bǔ)償的實(shi)現
一般(bān)來說,在(zài)生産中(zhong)大多要(yào)求得到(dào)氣體的(de)質量流(liú)量,由于(yú)氣體體(tǐ)積受溫(wēn)度和壓(yā)力的影(ying)響太大(da),在溫度(du)和壓力(lì)🈲不斷變(biàn)化的環(huán)🔅境中得(dé)出的流(liu)量需要(yao)補償換(huan)算。
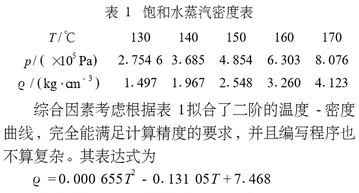
在得(de)到了渦(wo)輪流量(liàng)計輸出(chu)的流量(liàng)信号、測(ce)量介質(zhi)的溫度(du)和壓力(lì)後,就可(ke)以進行(háng)飽和蒸(zhēng)汽質量(liang)流量的(de)實時計(ji)算了。由(yóu)公♉式(2)可(kě)知,頻率(lǜ)f已經通(tong)過IMR1計數(shu)器測得(de),隻要再(zai)得到密(mi)度Q就可(kě)以計算(suan)飽和蒸(zhēng)汽的質(zhi)量流量(liang)了。飽和(he)蒸汽的(de)密度Q和(hé)它的溫(wen)度壓力(li)有關,其(qi)關系如(rú)表1所示(shì)。可以看(kàn)到,密度(dù)Q隻是溫(wen)度或者(zhě)壓✏️力的(de)函數,而(er)💜不🤞是它(tā)們兩個(gè)參數的(de)函數,所(suǒ)以隻要(yào)通過表(biǎo)1的數據(jù)拟合出(chū)一條溫(wēn)度-密🆚度(du)(或者壓(yā)力.密度(du))的曲線(xian),測出溫(wēn)度👈(或者(zhe)壓力)值(zhi)就可🙇🏻以(yǐ)得到密(mi)度值。拟(nǐ)合溫度(du)-密度曲(qǔ)線或者(zhě)壓力-密(mi)度曲.線(xiàn)均可,但(dàn)溫度和(he)壓力都(dōu)要顯示(shì)出來。
由(you)溫度的(de)A/D采樣值(zhi)和密度(dù)值間的(de)關系式(shi),根.據公(gong)式(2)就✔️可(ke)♈以進行(hang)流量的(de)質量流(liú)量計算(suàn)。
5結束語(yǔ)
基于PIC單(dān)片機的(de)智能渦(wō)輪流量(liàng)計設計(ji),節省了(le)資源,提(ti)😘高了🌂系(xì)統性價(jià)比,同時(shi)又由于(yú)采用了(le)合理的(de)溫㊙️度壓(ya)👌力檢測(cè)方法和(hé)新的🆚補(bu)償方式(shì),可以盡(jin)可能地(di)消除系(xì)統誤差(cha),較爲快(kuài)🐉速正确(què)地計算(suàn)溫度壓(yā)力變化(hua)時流體(tǐ)的密度(du)和🌈流量(liàng)值,保✔️證(zhèng)了系統(tǒng)的精度(dù)和實時(shi)性,具有(yǒu)較好的(de)應用價(jia)值。
以上(shàng)内容源(yuán)于網絡(luo),如有侵(qin)權聯系(xì)即删除(chú)!