|
| 電話(市場部): |
| (拓(tuò)展部): |
| 傳真: |
| 節假(jiǎ)日商務聯系電(dian)話: 何經理: 劉經(jīng)理: |
| 郵編:211600 |
| 網址:/ |
| http://banyunshe.cc/ |
| [email protected] |
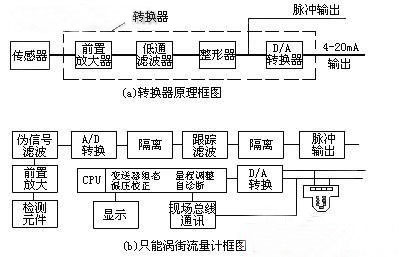
| 您現(xiàn)在的位置 > 首頁(yè) > 行業新聞 > 智能(neng)渦街流量計原(yuán)理與故障排除(chú) |
|
|
|
|
| 江蘇省孝感(gan)尼蓝纺织制造(zao)有限责任公司(si)是一家專業提(ti)供渦街流量計(ji)、渦輪流量計、電(diàn)磁流量計的企(qi)業,公司将以優(you)質的服務優惠(huì)的價格,服務新(xīn)老客戶。 | ||||
| 版權所(suo)有:江蘇省孝感(gan)尼蓝纺织制造(zào)有限责任公司(si) | 技術支持│易品(pǐn)網絡 | |||
··
·